
|
|
[China]

Trade Verify
Address: Building A2,Hutang Industrial zone,Lingdao Rd,Wujin District,Changzhou,China.Zip:213162
Contact name:Annie

CHANGZHOU JKONGMOTOR CO.,LTD |
|
Verified Suppliers
|

|
|
High Torque 30oz.in - 104oz.in Stepper Motor Nema17 With Brake Pad 1.8° Step Angle
The stepper motor is an electromagnetic device that converts
digital pulses into mechanical shaft rotation. Advantages of step
motors are low cost, high reliability, high torque at low speeds
and a simple, rugged construction that operates in almost any
environment. The main disadvantages in using a stepper motor is the
resonance effect often exhibited at low speeds and decreasing
torque with increasing speed.
Genaral Specification:
| Item | Specifications |
| Step Angle | 1.8° |
| Temperature Rise | 80℃max |
| Ambient Temperature | -20℃~+50℃ |
| Insulation Resistance | 100 MΩ Min. ,500VDC |
| Dielectric Strength | 500VAC for 1minute |
| Shaft Radial Play | 0.02Max. (450g-load) |
| Shaft Axial Play | 0.08Max. (450g-load) |
| Max. radial force | 28N (20mm from the flange) |
| Max. axial force | 10N |
Electrical Specification:
| Model No. | Step Angle | Motor Length | Current /Phase | Resistance /Phase | Inductance /Phase | Holding Torque | # of Leads | Detent Torque | Rotor Inertia | Mass |
| ( °) | (L)mm | A | Ω | mH | kg.cm | No. | g.cm | g.cm | Kg | |
| JK42HS34-1334BK0.3 | 1.8 | 34 | 1.33 | 2.1 | 2.5 | 2.2 | 4 | 120 | 34 | 0.22 |
| JK42HS40-1684BK0.3 | 1.8 | 40 | 1.68 | 1.65 | 3.2 | 3.6 | 4 | 150 | 54 | 0.28 |
| JK42HS48-2504BK0.3 | 1.8 | 48 | 2.5 | 1.6 | 1.8 | 5.0 | 4 | 260 | 68 | 0.35 |
| JK42HS60-1504BK0.3 | 1.8 | 60 | 1.5 | 4.0 | 6.0 | 7.5 | 4 | 280 | 102 | 0.5 |
Dimensions: (Unit=mm)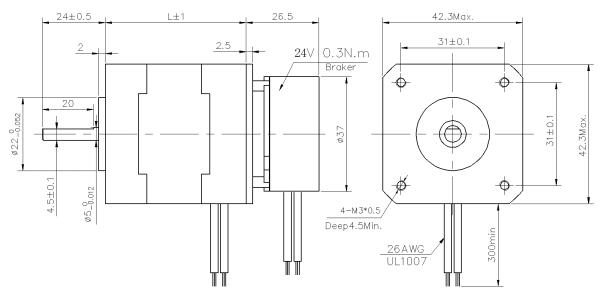

Stepper Motor Advantages





