|
|
[China]

Trade Verify
Address: 23E BlockB,Lushan Building,Chunfeng Road,Luohu District,Shenzhen,518001,China
Contact name:Eva

Shenzhen Wisdomlong Technology CO.,LTD |
|
Verified Suppliers
|

|
|
Yaskawa 0.44A AC SERVO MOTOR Industrial Servo Motor 0.095N.m 30W SGMAH-A3A1A4S
Item Description
OTHER SUPERIOR PRODUCTS
SIMILAR PRODUCTS
SGM-02A3YB11 SGM-04A314C
SGM-04A314B SGM-04A314C
SGMG-06A2BBB SGMG-1AA2A
SGMG-20A2AAB SGMG-20A2A
SGMAS-04A2A21 SGMAH-Q1AAF41
SGMPH-01AAA41 SGMPH-01A1A21
SGMP-01U314M SGMP-02U314M
SGMAH-02BAA21 USASEM-02A
USAREM-01DN2X USAREM-07AF111
USAREM-07CE2 USAREM-07AE2K
USAFED-02DA1 SGMP-08AWYR42
SGMP-08A314 SGM-01A3T012
SGM-01A312C SGM-A3A314
SGMAH-01A1A41 SGMAH-02AAA41
SGM-02GNK23 SGM-02AGSUX
SGMAH-04AAA41 SGM-02A3SU12
R02MAK0E RO1SAK0E
USASEM-02AE2 USAREM-01BF2KB
USAFED-09-KN52 USAREM-02C
SGMPH-081A21 SGMPH-08AAA41
SGMPH-15A1A41 SGM-08A31
SGM-08A314 SGM-08AWFJ73
SGM-04AWYH61 SGM-01U314M
SGM-02B314B SGMG-90A2W-TW11
USAGED-09A22K SGM-04AWFJ32
SGMP-04AWYR32 SGMP-01AWYR22
SGMP-01AW SU12 SGMP-04AWYR31
SGMP-04AWYR62 SGM-04AWYR13
SGMP-02W3026 SGM-08AWFJ41
SGMGH-03ACB21 SGMPH-15AAA21
SGMPH-15A1A-YR11 USAPEM-07YR23
SGM-01U3B4L SGM-08A314S
The output sine wave would be slightly smaller than the input and will exhibit a small phase shift.
The real beauty of the Bode diagram is its use in analyzing
compensation techniques and the effects
of loads and machine resonances. Loads and resonances limit the
gain one can use without incurring instability. Compensation
techniques allow one to increase A at low frequencies while
maintaining
the frequency bandwidth (the frequency where A = 1). These
compensation techniques are the things
that the vendors normally tout.
The purpose of this month's column has been to provide a basic
understanding of Bode diagrams so
you can better understand vendor offerings. If you comprehend what
has been written here, you will
know more about Bode diagrams than I do about women after 31 years
of marriage (which means we
both still have a lot to learn). Certainly this new found knowledge
will not make you a "10" as a
servo expert, but there aren't many Bo Dereks around, either.
Torque Generation
The torque produced by a stepper motor depends on several factors.
• The step rate
• The drive current in the windings
• The drive design or type
In a stepper motor a torque is developed when the magnetic fluxes
of the rotor and stator are displaced from each other. The stator
is made up of a high permeability magnetic material.
The presence of this high permeability material causes the magnetic
flux to be confined for the most part to the paths defined by the
stator structure in the same fashion that currents are confined to
the conductors of an electronic circuit. This serves to concentrate
the flux at the stator poles. The
Figure 4. Principle of a disc magnet motor developed by Portescap.=
N N N N S S S 3
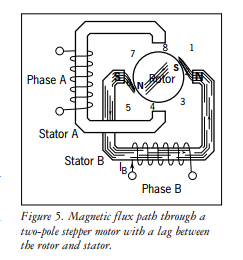
Figure 5. Magnetic flux path through a two-pole stepper motor with
a lag between the rotor and stator.
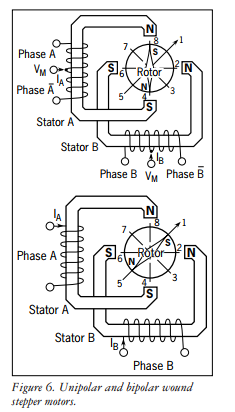
Figure 6. Unipolar and bipolar wound stepper motors. torque output
produced by the motor is proportional to the intensity of the
magnetic flux generated when the winding is energized.
The basic relationship which defines the intensity of the magnetic
flux is defined by:
H = (N × i) ÷ l where:
N = The number of winding turns
i = current
H = Magnetic field intensity
l = Magnetic flux path length
This relationship shows that the magnetic flux intensity and
consequently the torque is proportional to
the number of winding turns and the current and inversely
proportional to the length of the magnetic flux path.
From this basic relationship one can see that the same frame size
stepper motor could have very different torque output capabilities
simply by changing the winding parameters. More detailed
information on how the winding parameters affect the output
capability of the motor can be found in the application note
entitled “Drive Circuit Basics”.