|
|
[China]

Trade Verify
Address: 4th Floor Block 1, COFCO(FUAN) Robotics Industrial Park , Da Yang Road No. 90, Fuyong Distict, Shenzhen City, China
Contact name:Alice Du

Shenzhen Rion Technology Co., Ltd. |
|
Verified Suppliers
|

|
|
3 Axis Gyro Compass Sensor 0.1deg Resolution For Heading Angle
Finding
▶ MAIN FEATURES
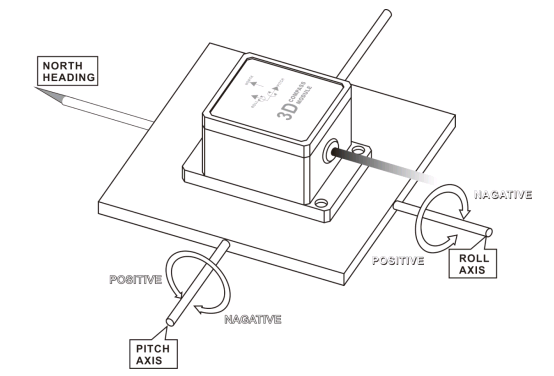
★ Inclination angle measurement range: pitch ±85°, roll angle ±180°
★ With hard magnetic, soft magnetic and tilt angle compensation
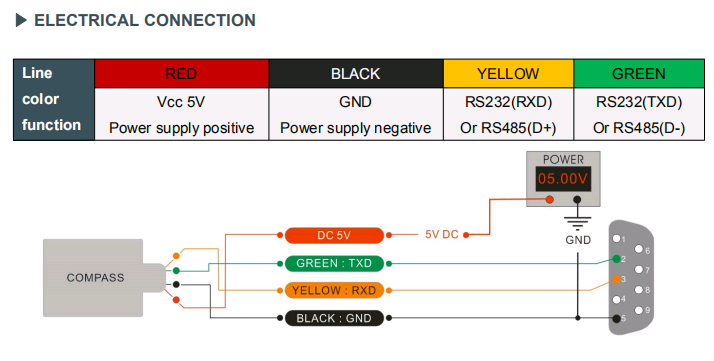
★ Standard RS232/RS485/TTL output interface
★ Azimuth angle accuracy: 0.8°
★ Inclination resolution: 0.1°
★ Inclination accuracy: 0.2°
★ Wide temp. range: -40℃~+85℃
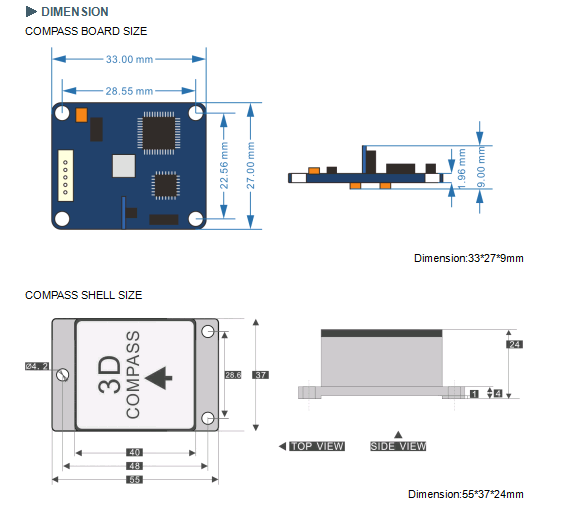
★ Dimesion: L55×W37×H24mm
★ DC 5V power supply
★ IP67 waterproof rating
▶ APPLICATION
★ Satellite ★ antenna search ★ Marine surveying and mapping ★ GPS
integrated navigation
★ Antenna servo control ★ Unmanned aerial vehicle ★ Infrared imager
★ Laser rangefinder ★ ROV underwater robot navigation ★ Special
occasion robot
DDM350B / DDM360B is a three-dimensional dynamic electronic
compass, which integrates a 9-axis inertial measurement unit,
including a three-axis accelerometer, a three-axis gyroscope, and a
three-axis fluxgate. Utilizing the high dynamic angle
characteristics of the gyroscope and the highly stable attitude
characteristics of the accelerometer, the pitch and roll angles
that follow the complex attitude changes are obtained through the
dynamic inertial navigation algorithm. The geomagnetic azimuth
angle adopts hard magnetic and soft magnetic calibration
algorithms, so that the compass can eliminate the influence of the
magnetic field through the calibration algorithm even in the
environment with magnetic field interference. The heading is
calculated in real time by the central processor, and the dynamic
pitch and roll angles are used for dynamic heading compensation for
a wide range of magnetic azimuths, ensuring that the compass can
provide high-precision heading data even at tilt angles of up to
±85°. The electronic compass integrates a high-level DSP arithmetic
processor with diversified output modes. The standard interfaces
include RS232/RS485/TTL and other interfaces, and other
communication interfaces can be customized.
DDM350B / DDM360B is small and low power consumpting. It can be
used in marine vessels, antennas and satellites, commercial drones,
and many other high-vibration, extremely harsh environments. It is
more suitable for today's various high-precision measurement
integrated control systems.

▶ SPECIFICATION
| Compass heading | Heading accuracy | 0.8° |
| Resolution | 0.1° | |
| Pitch range | ±90° | |
| Roll range | ±180° | |
| Inclination accuracy | Static state 0.2° | |
| Dynamic 0.5° | ||
| Resolution | 0.1° | |
| Tilt compensation angle range | Roll ±180° | |
| Pitch <85° | ||
| Calibration | Hard iron calibration | yes |
| Soft iron calibration | yes | |
| Magnetic field interference calibration method | One rotation of the plane (two-dimensional calibration) | |
| Physical feature | Size | L55×W37×H24mm |
| RS232/RS485/TTL | 4 cores 1-meter direct lead cable | |
| Interface | Startup delay | <50ms |
| Output rate | 20Hz/s | |
| Baud rate | 2400 to 115200baud | |
| Output format | Binary high performance protocol | |
| Power | Supply voltage | (Default) DC +5V |
| (Customized) DC 9~36V | ||
| Current (MAX) | 45mA | |
| Ideal model | 35mA | |
| Sleep mode | TBD | |
| Environment | Operating range | -40℃~+85℃ |
| Storage temperature | -40℃~+100℃ | |
| Vibration resistance | 2500g | |
| EMC | According to EN61000 and GBT17626 | |
| MTBF | ≥40000 hours/time | |
| Insulation resistance | ≥100 megohm | |
| Impact resistance | 100g@11ms,3 Axial Direction (Half Sinusoid) | |
| Anti-vibration | 10grms,10~1000Hz | |
| Weight | Single board: ≤25g ≤135g (including 1 meter cable) | |