

Active Member
|
[China]

Address: 5 Jixiang South Road, Chashan Town,Dongguan,Guangdong,China
Contact name:

Guangdong Nuonengtai Automation Technology Co., Ltd. |

|
|
NNT MHS4 Series Hardness 4 Jaw Pneumatic Gripper Pneumatic Robot Gripper
Pneumatic finger, also known as finger cylinder, is a technical
professional tooling fixture in the pneumatic manufacturing
industry. It can be divided into four categories according to its
function and characteristics.
1. Parallel gripper
The fingers of the parallel gripper are based on the posture of the
2 pistons. Each piston is connected with a pneumatic finger by a
roller and a double crank to produce a unique driver module. In
that way, the pneumatic fingers always move radially to the center,
and each finger cannot be moved independently. If the finger is
moved in the opposite direction, the previously stressed piston is
in the exhaust pipe condition, and the other piston is in the force
condition. The parallel surface gripper is driven by a single
piston, the pivot pushes the crank, and each of the two claws has a
corresponding crank groove. In order to reduce frictional
resistance, the claw piece is connected with itself as a steel ball
slide structure.
2. Shaking gripper (Y-shaped gripper) There is a ring groove on the
piston rod of the shaking gripper. Because the finger trunnion is
connected with the ring groove, the fingers can be moved separately
and automatically centered, and grasping is guaranteed The torque
is finally stable.
3. Rotating jaws The posture of rotating jaws is working in
accordance with the basic principle of rack and pinion toothing.
The piston is fixed together with a shaft that can move left and
right. There are three ring grooves at the end of the shaft, and
this groove is engaged with the teeth of the two driving wheels.
Therefore, the pneumatic finger can be moved separately and
centered automatically. The basic principle of the rack ensures
that the grasping range is stable from beginning to end.
Four, three-point gripper The piston of the three-point gripper has
an annular groove, and each crank is connected with a pneumatic
finger. The piston fitness exercise can drive three crank postures,
so the three fingers can be manipulated to open and close together.

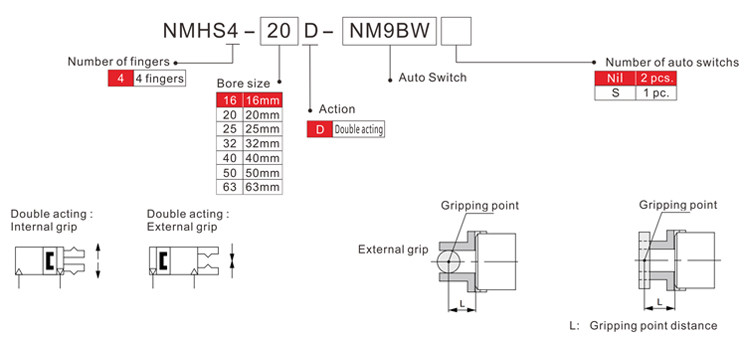
| Model | NMHS4-16D | NMHS4-20D | NMHS4-25D | NMHS4-32D | NMHS4-40D | NMHS4-50D | NMHS4-63D |
| Bore Size(mm) | 16 | 20 | 25 | 32 | 40 | 50 | 63 |
| External grip | 10 | 19 | 31 | 55 | 88 | 140 | 251 |
| Internal grip | 12 | 21 | 35 | 61 | 97 | 153 | 268 |
| Opening/Closing stroke(mm) | 4 | 4 | 6 | 8 | 8 | 12 | 16 |
| Weight (g) | 66 | 110 | 154 | 300 | 390 | 590 | 1095 |
Company Profile
NNT,Guangdong Nuonengtai Automation Technology Co., Ltd.is devoted to provide high quality industrial pneumatic control components to the domestic and international customers. We've been focusing on products innovation, R&D(research and development) and quality control, which also enables NNT in the peer enjoy a good reputation.
Contact Us
Whatsapp:+86 17702626719
Wechat:17702626719
Email:Jacob@nntqd.com
Packing&Shipping
Package:Standard export carton packing
Delivery time:3-20 days after confirming order,detail delivery data should be decided according to production season and order quantity.
FAQ
Q:How can i get the sample to chcek your quality?
A:After price confirmation,you can require for samples to check our product detials.
Q:What can i get the price?
A:We usually quote within 24 hours after we get your inquiry.If you are very urgent to get the price,please tell us in youre email so that we will regard your price priority.
.





