
|
|
[China]

Trade Verify
Address: Kaifull Industrial Part, Goabu Industrial Area, Donguan, Guangdong, China, 523287
Contact name:Bruce Niu

Shenzhen Zion Kaifull Automation Technology Co., Ltd. |
|
Verified Suppliers
|

|
|
42HS060 Series Hollow Shaft 2 Phase Hybrid Stepper Motors
1. Product Overview
Step motor is a motor that converts the electrical pulse signal into the corresponding angle displacement or the line displacement. It can use the quantity and frequency of the pulse to control the rotation (rotation angle, rotation speed) in automation applications. For each of the pulse, the motor rotor rotates a angle or forward, and its output angle shift or line displacement is proportional to the input pulse, and the speed is proportional to the pulse frequency. Therefore, step motor is also called pulse motor.
In the case of non-overload, the speed of the motor and the stop position depends only on the frequency and number of the pulsed input, without being affected by the load change. That is to say, add a pulse signal to the motor, and the motor turns a step distance. The advantage of this linear relationship between pulse and angle rotation, plus that a step motor only has periodic errors without cumulative errors, make step motor widely used in automation speed, position and other control fields easily.
With the development of product research and development of technology, the performance of the step system has been even more improved. If the stepper system is not overloaded, there will be no step loss mostly nowadays, and life time very long, almost no need maintenance, which makes steppers popular and widely used in many kinds of industrial automation motion control applications.
Although the stepper motor and its control technology are currently very mature, if not used properly, there may still be a situation of step loss, that is, position error etc. Here, we will analyze some problems and solutions.
Losing pulses when changing direction leads to inaccurate positioning
When changing direction, the pulse is lost, which means that it is accurate in any direction, but as soon as the direction is changed, errors accumulate, and the more times it is changed, the more biased it is.
Solution: Generally, stepper drivers have certain requirements for direction and pulse signals. For example, the direction signal is determined a few microseconds before the first rising or falling edge of the pulse (different drivers have different requirements) arrives. Otherwise, there will be a pulse that runs in the opposite direction of the actual required direction. Finally, the problem will appear as it deviates more and more, with smaller subdivisions becoming more prominent. The main solution is to use software to change the logic of the pulse or add a delay.
The initial speed is too high and the acceleration is too large, which sometimes causes stepping loss.
Solution: Due to the characteristics of the stepper motor, the initial speed should not be too high, especially when the load inertia is large. It is recommended to have the initial speed below 1r/s, so that the impact is small. If the same acceleration is too large, it will also have a large impact on the system, which is simple overshoot
Insufficient motor output torque
Solution: Increase the motor current appropriately, increase the voltage of the progressive driver (pay attention to the optional driver), and choose a motor with higher torque.
Environmental electromagnetic interference causes mis-operation of the controller or driver, resulting in inaccurate positioning.
It is necessary to identify the source of disturbance and reduce its electromagnetic interference on the stepper system, such as increasing spatial distance, using shielded wires for signal lines, and ensuring good grounding of the controller or driver to block communication channels and improve its anti-interference ability.
Solutions:
The Applications of Kaifull PRMCAS Hybrid Stepper Motors
The stepper motor is mainly used in the field of CNC machine tool manufacturing. The reason why it is mainly used in this field is that the motor does not require A/D conversion and can directly convert digital pulse signals into angular displacement, which is exactly what CNC machine tool equipment needs and cannot be achieved by many other types of motors. Therefore, the stepper motor can be said to be the most ideal executive component of CNC machines, and it will naturally be widely used in the manufacturing field of CNC machines.
Stepper motors can also be used in many other machinery, such as motors in automatic feeding machines and general-purpose floppy disk drives. In addition, it can also be applied in printers and plotters.
Stepper motors have the characteristics of fast start stop and positioning, and are often used as actuators for position control in the field of digital control. In the fast operation of a stepper motor, it is required that the driving circuit provide the driving current to the stepper motor winding as close as possible to the technical specifications required to generate sufficient torque. The maximum allowable temperature on the surface of the stepper motor. Stepper motors are used in conjunction with drivers, and many drivers support subdivision function, which achieves very small step angles and more precise control. The torque of the stepper motor will decrease as the speed increases. The accuracy of a general stepper motor is 3-5% of the stepper angle and does not accumulate. The stepper motor can operate normally at low speeds, but cannot start above a certain speed, accompanied by a whistling sound.
Widely used in ATM machines, inkjet printers, engraving machines, photo machines, spraying equipment, medical instruments and equipment, computer peripherals and massive storage devices, precision instruments, industrial control systems, office automation, robots and other fields, especially suitable for applications that require smooth operation, low noise, fast response, long service life, and high output torque.
Machine tool industry
Stepper motors are widely used in the machine tool industry, mainly for controlling the feed and positioning of machine tools. In CNC machine tools, stepper motors can accurately control the machining position and speed of workpieces, thereby achieving high-precision machining. In addition, stepper motors can also be used to control the automatic feeding and tool changing functions of machine tools.
Automation equipment
Stepper motors are also widely used in automation equipment, such as automated production lines, automated packaging machines, automated handling robots, etc. Stepper motors can accurately control the movement and position of equipment, thereby achieving efficient automated production.
Electronic devices
Stepper motors also have certain applications in electronic devices, such as in various stages of electronic product production, such as solder paste printing, SMT placement, reflow soldering, visual inspection, production of cables with terminals, dispensing machines, screen laminating machines, etc. They can also be used in many devices, such as ATMs, vending machines, 3D printers, scanners, printers, etc.
Medical equipment
Stepper motors are also applied in medical equipment, such as medical robots, surgical instruments, etc. Stepping motors can accurately control the movement and position of robots and surgical instruments, thereby achieving high-precision surgery and treatment.
The automotive industry
Stepping motors are also applied in the automotive industry, such as seat adjusters, air conditioning door controllers, and so on. The stepper motor can precisely control the position and movement of car seats and air conditioning doors, thereby improving the comfort and safety of the car.
In the field of robotics
Stepping motors are also widely used in the field of robotics, such as industrial robots, service robots, etc. Stepping motors can accurately control the motion and position of robots, thereby achieving efficient production and service.
In summary, stepper motors have a wide range of applications in many fields, and their high accuracy, fast response speed, and convenient control make them the core components of many automation equipment. With the continuous progress of technology, the application fields of stepper motors will continue to expand and deepen.
2. Hybrid Stepper Motor General Technical Specifications
| Step Angle | 1.8° (2 Phase) |
| Step Angle Accuracy | 0.09° |
| Shaft Type | Single, Dia. 5mm (Customizable) |
| Max. Temperature Rise | Less than 80 °C (Rated Current) |
| Max. Surface Temperatures | Max Allowed 100℃ |
| Ambient Temperature | -20 °C ~ +50 °C |
| Insulation Grade | 100 MΩ Min. , Class B |
| Dielectric Strengt | 500 VAC for 1 Minute |
| Max. Axial Load | 10N |
| Max. Radial Load | 25N (10mm from mounting Surface) |
| Certificates | Rohs, CE, CCC (As per Customer Need) |
3. Hybrid Stepper motor Performance Datasheet
| Model | Current | Resistance | Inductance | Holding Torque | Detent Torque | Rotor Inertia | Bi/Unipolar | Weight | Length |
| A/Ø | Ω/Ø | mH/Ø | N.m | N.cm | g.cm2 | # of Leads | g | mm | |
| 42HS060-1964S-47 | 1.96 | 1.9 | 4 | 0.6 | 2.5 | 73 | Bi (4) | 350 | 47.5 |
| 42HS060-1404S-47 | 1.4 | 3.5 | 7.4 | 0.6 | 2.5 | 73 | Bi (4) | 350 | 47.5 |
| 42HS060-1004S-47 | 1.0 | 7.2 | 15 | 0.6 | 2.5 | 73 | Bi (4) | 350 | 47.5 |
| 42HS060-0704S-47 | 0.7 | 13.8 | 29 | 0.6 | 2.5 | 73 | Bi (4) | 350 | 47.5 |
4. Mechanical Dimensions (in mm)

5. Matching Connector with Leads Dimenssions

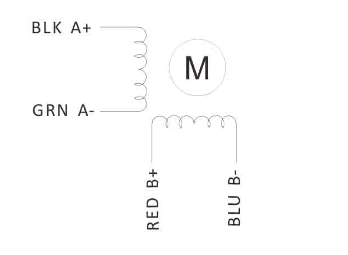
6. Wiring Diagram
7. Torque Speed Curves






