

Active Member
|
[China]

Address: 3F, Block C,Tianan Industrial Park,New North District,Changzhou City, Jiangsu Province,China
Contact name:Linda Liu

Changzhou Prostepper Co.,Ltd. |

|
|
1.8 Degree NEMA24 Stepper Motor Holding Torque Brake Stepper Motor With Encoder For Medical System
Specifications of brake stepper motor
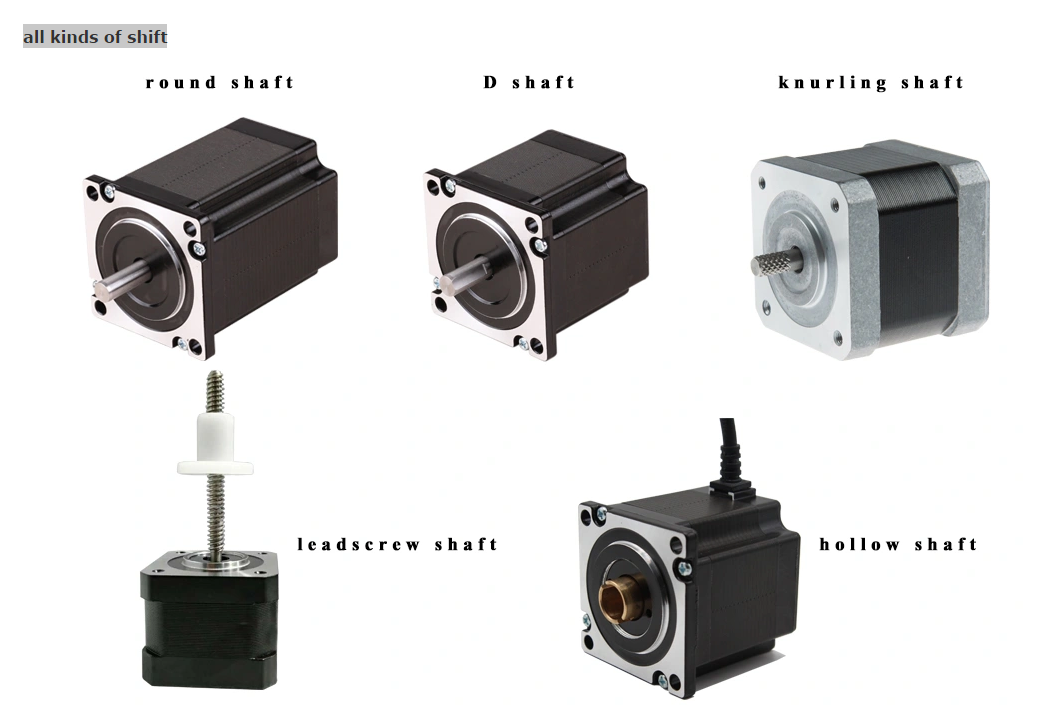
1. Shaft Dia= 5mm
2. Step Angle: 1.8 degree
3. Phase Current: 5A
4. Phase Resistance: 0.34Ω/Phase
5. Phase Inductance: 1.1mH
6. Holding Torque: 2.2N.cm
7. Braking Torque: 1.3N.cm
8. Rotor Inertia: 490g.cm32;
9. Wire: 4(Blue, green, black, red)
10. Max. Temperature Rise: 80"C (rated current, 2 phase on)11. Operating Temperature: -20*C-+70"C
11.Output:Differental
12. Insulation Resistance: 100 MQ Min., 500VDC


Product description of 2 phase hybrid brake stepper motor
Longer Life
Stepping motor is a mechanical structure,which does not need be changed by electric brush or Hall sensor,thus reducing the probability and increasing the motor life.Stepping motor life usually determined by the life of the bearing.
The rotational speed of the stepping motor can be precisely controlled ,By controlling the frequency of the electric pulse.
Forward/Reverse Rotation,Pause and Hold
The forward /reverse rotation of the stepping motor can be controlled by the input sequence of the controlled electric pulses.
In the case of the a stepping motor lock(the motor winding is energized,there is no external electric pulse command),the stepping motor can still maintain a certain torque output.

Encoder Specifications Brake Specifications
| Model | E1K | E2k5z | Model | PEM57/PEM60 |
| Resolution | 1000cpr/4000ppr | 2500cpr/10000ppr | Brake Type | Holding Brake |
| Type | Incremental encoder | Incremental encoder | Voltage | 24VDC±5% |
| Output Mode | Differental | Differental | Power | 5W |
| Output Signal | A+A-;B+B- | A+A-;B+B-;Z+Z- | Torque | 1.3N.m |
| Supple Voltage | 5VDC±5% | 5VDC±5% | Release Time | 50ms |
Why choose stepper motor
Advantage of Product





